AÉROSTABILES
Programme de recherche-création
AÉROSTABILES
Programme de recherche-création
Programme de recherche-création exploitant les possibilités artistiques d’automates cubiques volants, équipés de senseurs, de moteurs et de contrôleurs qui leur permettent de développer des comportements avancés : interactions avec l’environnement et avec les humains, assemblage en vol… Les Aérostabiles constituent une plate-forme unique d’exploration en arts technologiques, en robotique collective et en performance hybride.

REPORTAGE VIDÉO « LES GROSSES TÊTES » [réal. URBANIA TV, 2015 ]

VOILES | SAILS [réal. NXI GESTATIO, 2009]

MASCARILLONS [réal. NXI GESTATIO, 2006] VERSION ANGLAISE
INSTALLATIONS, RÉSIDENCES ET PERFORMANCES
Situé à la croisée de l'Art, l'Architecture et la Science, le projet Aérostabile constitue la deuxième phase du projet [ VOILES | SAILS ], acronyme de « Self-Assembling Lighter-than-air Intelligent Structures ». Démarré en 2002 sur la base d’un partenariat qui incluait le laboratoire CORO (Collective Robotics) du professeur Alcherio Martinoli (EPFL, Lausanne), le laboratoire d’éthologie et de cognition animale du professeur Guy Théraulaz (U. Paul Sabatier, Toulouse), le laboratoire Intelligent Artificial Systems du professeur Alan WInfield (U. Of Bristol, UK), il a depuis entraîné des collaborations intensives avec plusieurs autres groupes de recherches et universités (voir liste ci-dessous) pour produire un environnement robotique dédié à l'architecture, aux technologies et à la recherche scientifique, avec un potentiel majeur pour les performances multimédia. La recherche porte sur le développement de robots volants dont les formes géométriques et les capacités d'interaction permettent le développement d'assemblages et de comportements collectifs par un protocole dit "d'intelligence en essaim".
Le projet trouve son origine dans un projet artistique conçu en 1988 par le professeur Nicolas Reeves durant ses études de maîtrise, mais impossible à réaliser à cette époque, qui consistait à construire des structures architecturales en vol stationnaire qui épousaient la forme de cubes ou de pyramides, des formes complètement inadaptées à l’idée même de voler. Le contraste entre ces formes et de leurs capacités de vol devenait un paradoxe qui constituerait en lui-même un manifeste architectural
Les premiers cubes volants ont été construits en 1999 (Montréal et Moncton) et 2000 (Montréal). Le cube Moncton planait au-dessus d'une rivière, et a été conçu pour faire sonner un carillon au passage d’un mascaret ; le mot "Mascarillon» provient de la contraction des mots « Mascaret » et « Carillon ».
Technologiquement parlant, les programmes [VOILES | SAILS] et Aérostabiles cherchent à porter à la « plate-forme réalité » une partie de l'étonnant potentiel des dispositifs de vie artificielle qui abondent dans les espaces virtuels. Ils s'intéressent en particulier aux simulations d'assemblages et de comportements dérivés de l'observation de sociétés animales (animalcules coralliens, fourmis, guêpes, termites…), là où la collaboration d’individus aux possibilités individuelles très limitées produit des comportements et des structures parfois extrêmement complexes.
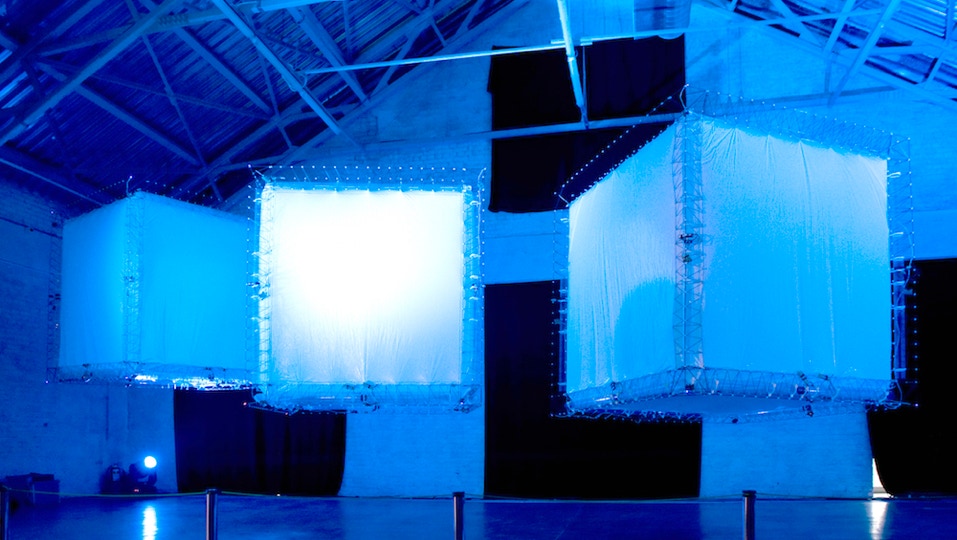
Le programme a mené à la réalisation de plusieurs robots cubiques destinés à voler au sein de grands espaces intérieurs. Plusieurs modèles ont été produits, dont un prototype et quatre modèles expérimentaux en bois de tilleul (un M180t et quatre M170t « Mascarillon », respectivement 180 cm et 170 cm de côté), et cinq modèles en matériaux composites (un M160c "Nestor" et quatre M225c "Tryphon", respectivement 160 cm et 225 cm de côté). Il sont équipés d'un ordinateur de bord, de senseurs de divers types et de micro-turbines qui leur permettent de se déplacer et de pivoter selon les trois axes. Ils peuvent interagir entre eux, avec leur environnement, et réagissent aux conditions locales de température, de couleur et de luminosité, ainsi qu'aux obstacles et aux sons. Les cubes volants peuvent être pilotés par le geste, par le mouvement, par la lumière, ainsi que par la voix chantée : Les cubes volants peuvent être contrôlés par les gestes, les mouvements, la lumière, ainsi que par la voix chantée - de courtes mélodies déclenchent les différents comportements et changements d’états du cube. Ils peuvent également développer des comportements autonomes.
Les explorations qui ont été menées ces dernières années visaient d'une part à réaliser des comportements collectifs et des assemblages autonomes de plusieurs cubes, appelés "aérostabiles" en référence aux sculptures de Calder; d'autre part à explorer les relations et les interactions humains-automates, dans le cadre de performances chorégraphiées impliquant plusieurs cubes volants et plusieurs performeur/e/s.
Le programme a mené à de nombreuses conférences et installations artistiques présentées sur quatre continents. Parmi les plus notables (voir liens ci-contre), on note :
« Paradoxical Sleep » (Sao Paulo 2012) - Un cube robotique volant de 225cm de côté flotte immobile dans l'espace, réajustant constamment sa position grâce à un ensemble de capteurs et d'actuateurs, et d'un ordinateur embarqué. Une danseuse- performeuse interagit avec lui par ses mouvements, ses déplacements et son chant. Les mélodies chantées déclenchent des changements d'état et de position du cube .
« La Caverne au Tryphon » (Sainte-Engrâce, France) - performance expérimentale publique – Un aérostabile (automate cubique volant, équipé de projecteurs et de cameras) flotte comme en lévitation dans une immense caverne naturelle et part régulièrement en mission vers des régions inaccessibles de la voûte et des tunnels jamais visités pour en transmettre des films et des images. Salle de La Verna, gouffre de la Pierre-Saint-Martin, juillet 2015.